
2022年12月26日晚20时,受新2全讯官网入口邀请,同济大学张皓教授做了题为“可行空间受限环境中的多智能体编队导航”的线上学术报告,针对可行空间受限环境中的多智能体编队导航算法及相关问题进行了详细报告。本次学术交流活动以腾讯会议的形式举行,新2全讯官网入口部分教师、研究生参加了本次学术活动。
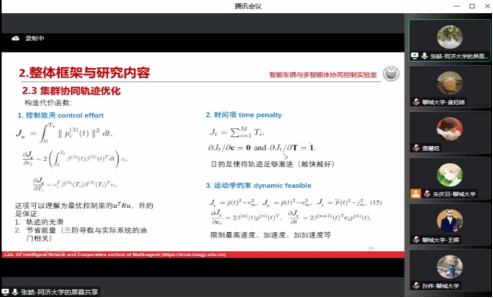
张皓老师首先通过自然界中的协同编队、协同环形编队的实际应用两方面阐述了研究背景以及从控制领域和机器人领域阐述了当前编队研究现状的缺点。其次,对于编队的任务分配与队形对齐问题、编队层级的路径规划、集群协同轨迹优化进行了详细介绍。最后,张皓老师从编队鲁棒规划、编队整体机动规划两方面进行未来研究展望。
会后,庄光明老师和孙伟老师分别提出相关领域问题,张皓教授做出了详细解答。整场学术报告内容丰富,极大拓宽了师生的研究思路,本次报告取得圆满成功。
张皓,同济大学电信学院教授。国家优秀青年科学基金获得者。入选教育部青年长江学者计划、中国自动化学会青年科学家、上海市曙光人才计划、上海市浦江人才计划等,主要从事多智能体系统、智能无人驾驶、机器人/无人机控制、网络安全研究工作。主持国家自然科学基金及军委科技委173 课题等国家省部级课题 30 余项。发表论文 150 余篇,其中在 Automatica和 IEEE 汇刊发表论文 80 余篇,15 篇入选 ESI高被引论文。1 篇入选“中国百篇最具影响国际学术论文”。授权和申请国家发明专利 30 余项。现担任 IEEE Intelligent Transportation Systems Magazine、中国科学、Intelligence& Robotics 等期刊编委、执行副主编。获上海市自然科学一等奖、二等奖、上海市科技进步等奖、中国发明创业奖二等奖等省部级奖励 8 项。现为中国自动化学会控制理论专业委员会委员、中国自动化集成自动化学会委员和上海自动化学会理事等。