
2022年12月26日晚19时,受新2全讯官网入口邀请,同济大学电信学院王祝萍教授应邀线上作了题为 “多机器人系统自主任务分配”的学术报告。此次报告以腾讯会议的形式举行,新2全讯官网入口复杂系统智能分析与控制团队的老师和研究生参加了本次报告会。
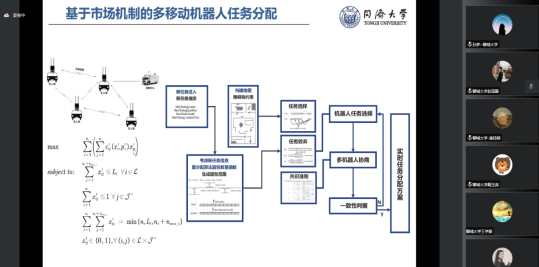
在此次报告中,王祝萍教授首先由多机器人系统任务分配的研究背景展开讨论,明确指出任务分配是多机器人系统实现复杂协同任务的关键技术。报告首先介绍基于市场机制的分布式任务分配策略,考虑了任务的重分配与路径障碍代价。通过找到执行问题的时间序列,来解决单个机器人执行多个任务,单个任务由单个机器人完成的问题。随后,王祝萍教授分别介绍了基于强化学习的任务分配策略研究和博弈驱动的任务分配策略研究两个技术路线,通过找到多智能体稳定的联盟结构,来解决单个机器人执行单个任务,单个任务由多个机器人完成的问题。最后,王祝萍教授将任务分配问题拓展到优化问题、博弈理论和强化学习三方面进行未来工作展望。
会后,庄光明老师和孙伟老师分别提出相关领域问题,王祝萍教授做出了详细解答,并进行了深入交流。整场学术报告精彩纷呈、内容丰富,使我院师生对多机器人系统任务分配有了更加深刻的认识,极大地拓展了学术视野,开拓了科研思路。
王祝萍,同济大学电信学院教授。主要从事机器人智能控制、无人驾驶决策与规划、多智能体协同、先进控制理论及应用的研究。主持/参加多项国家自然科学基金项目、国际合作项目、科技部重点研发项目、省部级科研项目,主持多项上海市及同济大学教学改革项目。出版专著二部及专著章节二篇,发表 IEEE 系列汇刊及本领域权威期刊、会议论文百余篇。获2009 年、2013 年上海市科技进步一等奖,2013 年上海市教学成果一等奖,2020 年上海市自然科学奖二等奖。现为IEEE CSS 智能控制学会委员,中国自动化集成自动化学会委员,上海自动化学会副秘书长,上海机器人学会监事等。